(Nanowerk News) A collaborative research team co-led by City University of Hong Kong (CityU) has developed a wearable tactile rendering system, which can mimic the sensation of touch with high spatial resolution and a rapid response rate. The team demonstrated its application potential in a braille display, adding the sense of touch in the metaverse for functions such as virtual reality shopping and gaming, and potentially facilitating the work of astronauts, deep-sea divers and others who need to wear thick gloves.
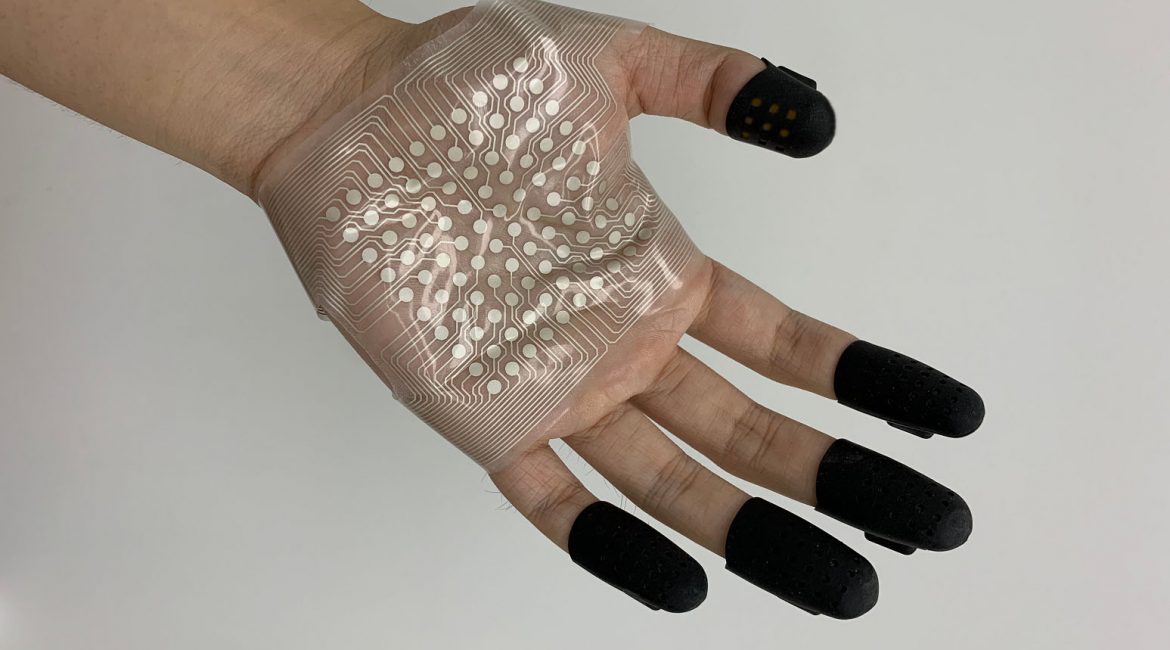
The new wearable tactile rendering system can mimic touch sensations with high spatial resolution and a rapid response rate. (Image: Robotics X Lab and City University of Hong Kong)
“We can hear and see our families over a long distance via phones and cameras, but we still cannot feel or hug them. We are physically isolated by space and time, especially during this long-lasting pandemic,” said Dr Yang Zhengbao, Associate Professor in the Department of Mechanical Engineering of CityU, who co-led the study. “Although there has been great progress in developing sensors that digitally capture tactile features with high resolution and high sensitivity, we still lack a system that can effectively virtualize the sense of touch that can record and playback tactile sensations over space and time.”
In collaboration with Chinese tech giant Tencent’s Robotics X Laboratory, the team developed a novel electrotactile rendering system for displaying various tactile sensations with high spatial resolution and a rapid response rate.
Existing techniques to reproduce tactile stimuli can be broadly classified into two categories: mechanical and electrical stimulation. By applying a localised mechanical force or vibration on the skin, mechanical actuators can elicit stable and continuous tactile sensations. However, they tend to be bulky, limiting the spatial resolution when integrated into a portable or wearable device.
Electrotactile stimulators, in contrast, which evoke touch sensations in the skin at the location of the electrode by passing a local electric current though the skin, can be light and flexible while offering higher resolution and a faster response. But most of them rely on high voltage direct-current (DC) pulses (up to hundreds of volts) to penetrate the stratum corneum, the outermost layer of the skin, to stimulate the receptors and nerves, which poses a safety concern. Also, the tactile rendering resolution needed to be improved.
The latest electro-tactile actuator developed by the team is very thin and flexible and can be easily integrated into a finger cot. This fingertip wearable device can display different tactile sensations, such as pressure, vibration, and texture roughness in high fidelity. Instead of using DC pulses, the team developed a high-frequency alternating stimulation strategy and succeeded in lowering the operating voltage under 30 V, ensuring the tactile rendering is safe and comfortable.
They also proposed a novel super-resolution strategy that can render tactile sensation at locations between physical electrodes, instead of only at the electrode locations. This increases the spatial resolution of their stimulators by more than three times (from 25 to 105 points), so the user can feel more realistic tactile perception.
Tactile stimuli with high spatial resolution
“Our new system can elicit tactile stimuli with both high spatial resolution (76 dots/cm2), similar to the density of related receptors in the human skin, and a rapid response rate (4 kHz),” said Mr Lin Weikang, a PhD student at CityU, who made and tested the device.
The team ran different tests to show various application possibilities of this new wearable electrotactile rendering system. For example, they proposed a new Braille strategy that is much easier for people with a visual impairment to learn.
Demonstration of the new system’s potential in a new font braille strategy for the display of letters and numbers.
The proposed strategy breaks down the alphabet and numerical digits into individual strokes and order in the same way they are written. By wearing the new electrotactile rendering system on a fingertip, the user can recognise the alphabet presented by feeling the direction and the sequence of the strokes with the fingertip sensor.
“This would be particularly useful for people who lose their eye sight later in life, allowing them to continue to read and write using the same alphabetic system they are used to, without the need to learn the whole Braille dot system,” said Dr Yang.
Enabling touch in the metaverse
Second, the new system is well suited for VR/AR applications and games, adding the sense of touch to the metaverse. The electrodes can be made highly flexible and scalable to cover larger areas, such as the palm. The team demonstrated that a user can virtually sense the texture of clothes in a virtual fashion shop. The user also experiences an itchy sensation in the fingertips when being licked by a VR cat. When stroking a virtual cat’s fur, the user can feel a variance in the roughness as the strokes change direction and speed.
Interaction with a virtual cat using the new system. When the user strokes the cat’s fur, variances in roughness can be conveyed to the palm as the strokes change direction and speed.
The system can also be useful in transmitting fine tactile details through thick gloves. The team successfully integrated the thin, light electrodes of the electrotactile rendering system into flexible tactile sensors on a safety glove. The tactile sensor array captures the pressure distribution on the exterior of the glove and relays the information to the user in real time through tactile stimulation.
In the experiment, the user could quickly and accurately locate a tiny steel washer just 1 mm in radius and 0.44mm thick based on the tactile feedback from the glove with sensors and stimulators. This shows the system’s potential in enabling high-fidelity tactile perception, which is currently unavailable to astronauts, firefighters, deep-sea divers and others who need wear thick protective suits or gloves.
The user can quickly and accurately locate a tiny steel washer (1 mm in radius and 0.44 mm thick) using only tactile feedback from the sensorized glove integrated with the new system.
“We expect our technology to benefit a broad spectrum of applications, such as information transmission, surgical training, teleoperation, and multimedia entertainment,” added Dr Yang.